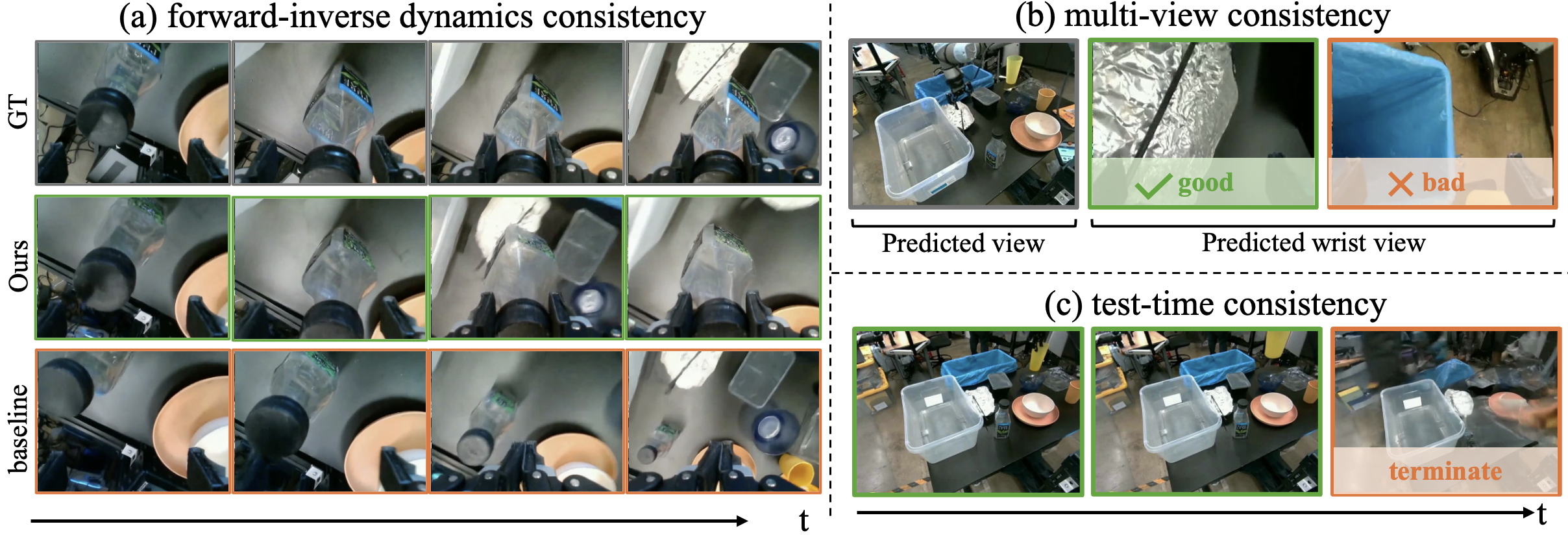
Cross-View Consistency
We compare online world model rollouts with and without cross-view inpainting mode. When the robot moves outside of the workspace and returns, cross-view consistency helps the model better recover the scene within the workspace for the wrist camera.